「半日で作る倒立振子」のArduino用のソースを、mbed FRDM-KL25Z用に書き直してみた。
Arduinoからmbedへの書き替えの概要はこんな感じ。
・I/Oアクセス部分を、Arduino書式からmbed書式へ変更
・アナログ入力部の変更
Arduino : 0 〜 1023 (0 〜 5V) ーーー> mbed : 0.0 〜 1.0 (0 〜 3.3V)
・PWM出力部の変更
Arduino : 0 〜 255 ーーー> mbed : 0.0 〜 1.0
・定周期処理の変更
Arduino : MsTimer2 ーーー> mbed : Ticker
元々のプログラムがシンプルなので移植はそれ程難しくなかった。
Arduinoの代わりにFRDM-KL25Z、通称”黒mbed”を搭載した様子。
Image may be NSFW.
Clik here to view.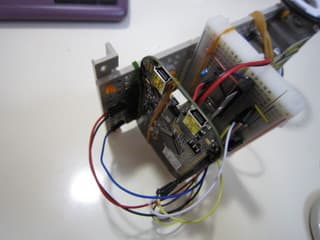
立った。
入出力の仕様をオリジナルの「半日で作る倒立振子」に合わせたので、ゲイン調整もほとんど不要だった。
Image may be NSFW.
Clik here to view.
動画はこちら。
モバイルバッテリーを付けてコードレス化してみた。
マウスパッドの上に載せているのは撮影に気を取られているうちに動き回って転落しない様にするため。
Image may be NSFW.
Clik here to view. Image may be NSFW.
Image may be NSFW.
Clik here to view.
モバイルバッテリーを付けてコードレス化し、XBee経由で内部状態をモニターできるようにした。
Image may be NSFW.
Clik here to view.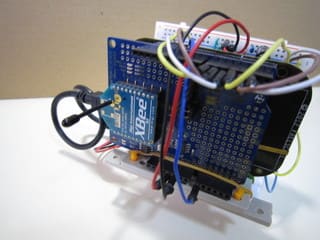
動画はこちら。
XBeeを付けて内部状態をモニター、Processingでグラフ表示するようにしてみた。
グラフのスケールは適当。(^^;)
Image may be NSFW.
Clik here to view.
Image may be NSFW.
Clik here to view.
mbed KL25Z版の2輪倒立振子ロボット、mbed LPC1114にも移植してみようかな。
づづく...
関連する記事
・LEGO Mindstorms EV3でGyro Boyを動かしてみた。(その1)
・LEGO Mindstorms EV3でGyro Boyを動かしてみた。(その2)
参考リンク