以前から倒立振子ロボットを作りたいと思っていたが、この記事を見つけたのでやってみることにした。
ほんとにできるのかな?
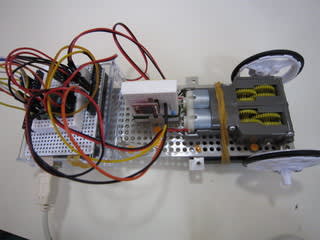
とりあえず手元のパーツを寄せ集めて作ってみる。
ジャイロとモータドライバ、ギヤボックスは同じものがなかったので今ある物を流用する。
”MPU-6050ジャイロセンサーモジュール”が使えるといいな。

手元のパーツを寄せ集めて形だけはできた。
使っているパーツが「半日で作る倒立振子」の物と違うのでソフトには手を加える必要がある。
ソースコードを読んでみたら予想外にシンプルなのでビックリ。

うーむ。やっぱり半日というわけにはいかないな。
アナログ出力ジャイロの挙動がおかしいのでI2Cのを試してみるかな。
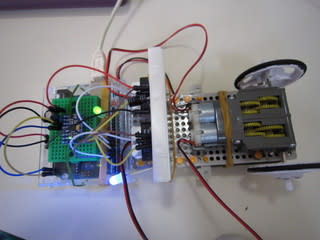
ジャイロをMPU-6050に替えてみた。
まだ立つところまでは行ってないが、立とうとする意志は見え始めた。(^^)
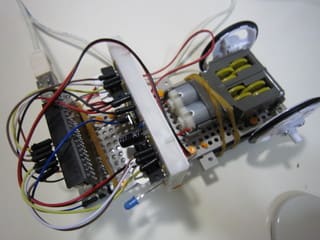
「半日で作る倒立振子」と同じ「圧電振動ジャイロモジュール(K-04912)」が手に入ったので使ってみた。
極短時間なら立つようになったがまだ先は長そう。
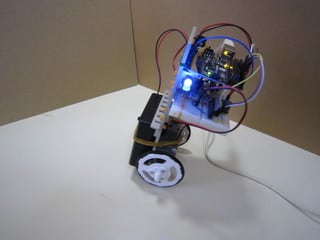
なかなかうまくいかないので「半日で作る倒立振子」と同じパーツで作ってみることにした。
あっさりと立ってしまった...今までの苦労は。orz
ずいぶん回り道をしてしまったが、とりあえず記事の通りに作れば動くことはわかった。
2輪倒立振子ロボットを作ってみた。(1)
Arduino用にモバイルバッテリーを付けてケーブルレスにしてみた。

モバイルバッテリーを付けたので前後の重量バランスが良くなった。

2輪倒立振子ロボットを作ってみた。(2)
バッテリーを上に移して重心が高くなるようにしたバージョン。

まだ不安定だが立つようにはなった。

2輪倒立振子ロボットを作ってみた。(3)
作ってみた感想
確かに「半日で作る倒立振子」の記事と同じパーツをそろえてあれば半日で動かすのも可能かも... 。
最大の難関はジャイロモジュールのチップコンデンサーの加工かな。
老眼でチップコンデンサーに半田付けするのはつらい。(^^;)
半田付けに不慣れな人も苦労するかも... それ以外はそれほど難しいところは無いと思う。
やっと動くようになったので、USBホストシールドをつけてPS3コントローラで操縦できるようにしてみたい。
あとマイコンをmbedに替えたり。夢は広がる。
とりあえず、次はジャイロをMPU-6050に取り換えてみる。
2号機作成へつづく...
関連する記事
・LEGO Mindstorms EV3でGyro Boyを動かしてみた。(その1)
・LEGO Mindstorms EV3でGyro Boyを動かしてみた。(その2)
・Arduino + Processingで 「MPU-6050 3軸ジャイロ3軸加速度センサー モジュール」を使ってみた。
参考リンク